Abstract
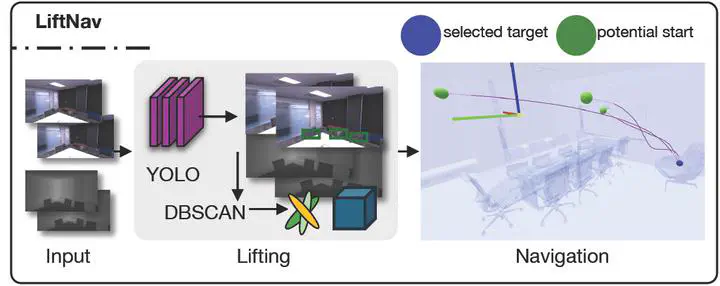
Autonomous robots in unknown indoor environments require both reliable collision avoidance and object-level understanding. Classical representations such as TSDF support safe planning but lack semantics, while photorealistic methods like Gaussian Splatting (GS) provide rich appearance yet suffer from soft geometry, limiting precise obstacle avoidance. We present LiftNav, a hybrid navigation framework built on GSFusion’s TSDF+GS dual map, augmented with a real-time pipeline of YOLO-based detection, TSDF-based 3D lifting, and B-spline trajectory optimization. This design enables flexible semantic navigation without dense 3D embeddings. We further introduce a hinge-loss-based collision penalty that improves trajectory smoothness and safety. We evaluate our approach in a simulation using the Replica dataset. Compared against a state-of-the-art radiance field baseline we show a 100% feasibility rate and shorter trajectories.
Hannah Schieber
Doctoral Candidate
I am interested in computer vision and extended reality. I research 3D scene content creation using neural rendering and guidance of people in 3D.
Dominik Frischmann
MSc Student
I am interested in computer vision and computer graphics. I research 3D scene content creation using neural rendering.
Victor Schaack
Doctoral Candidate,
Lab Manager HEX@Lab-Campus
My interests include surgery robotics, exoskeletons and inclusion of AI into human-robot-interaction.